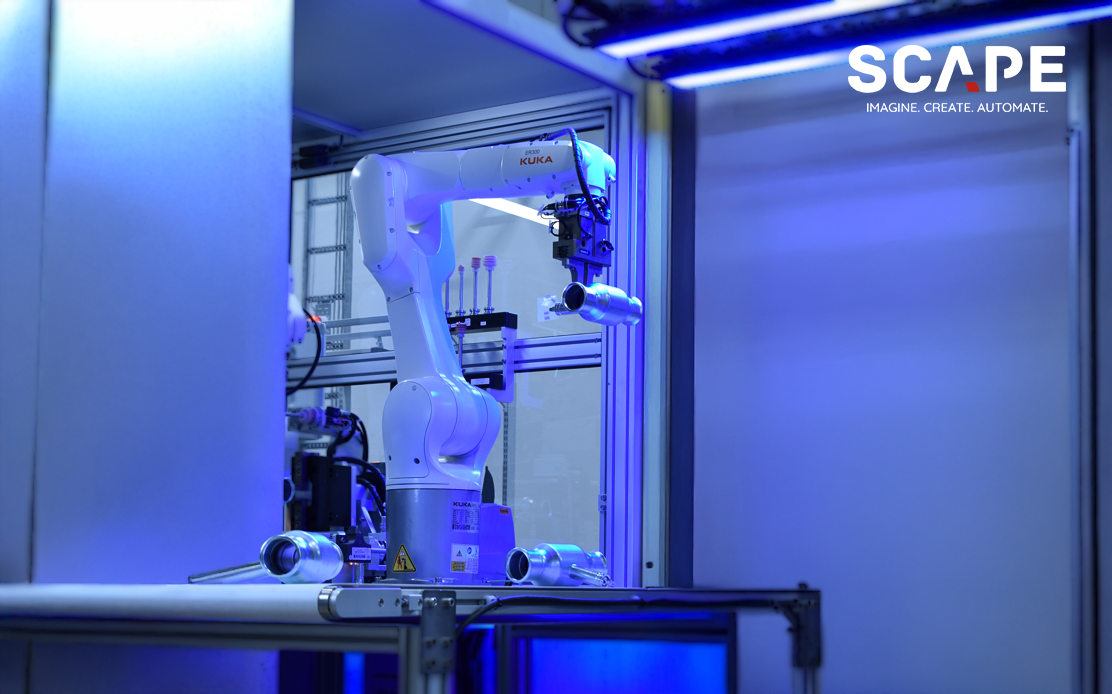
车间里,为了保护物料,工人会在物料上面放一些保护油,黑的同时还反光,对3D视觉的成像带来一定的挑战。在这种情况下,视科普为了识别工件,做了一定的参数和算法的优化。
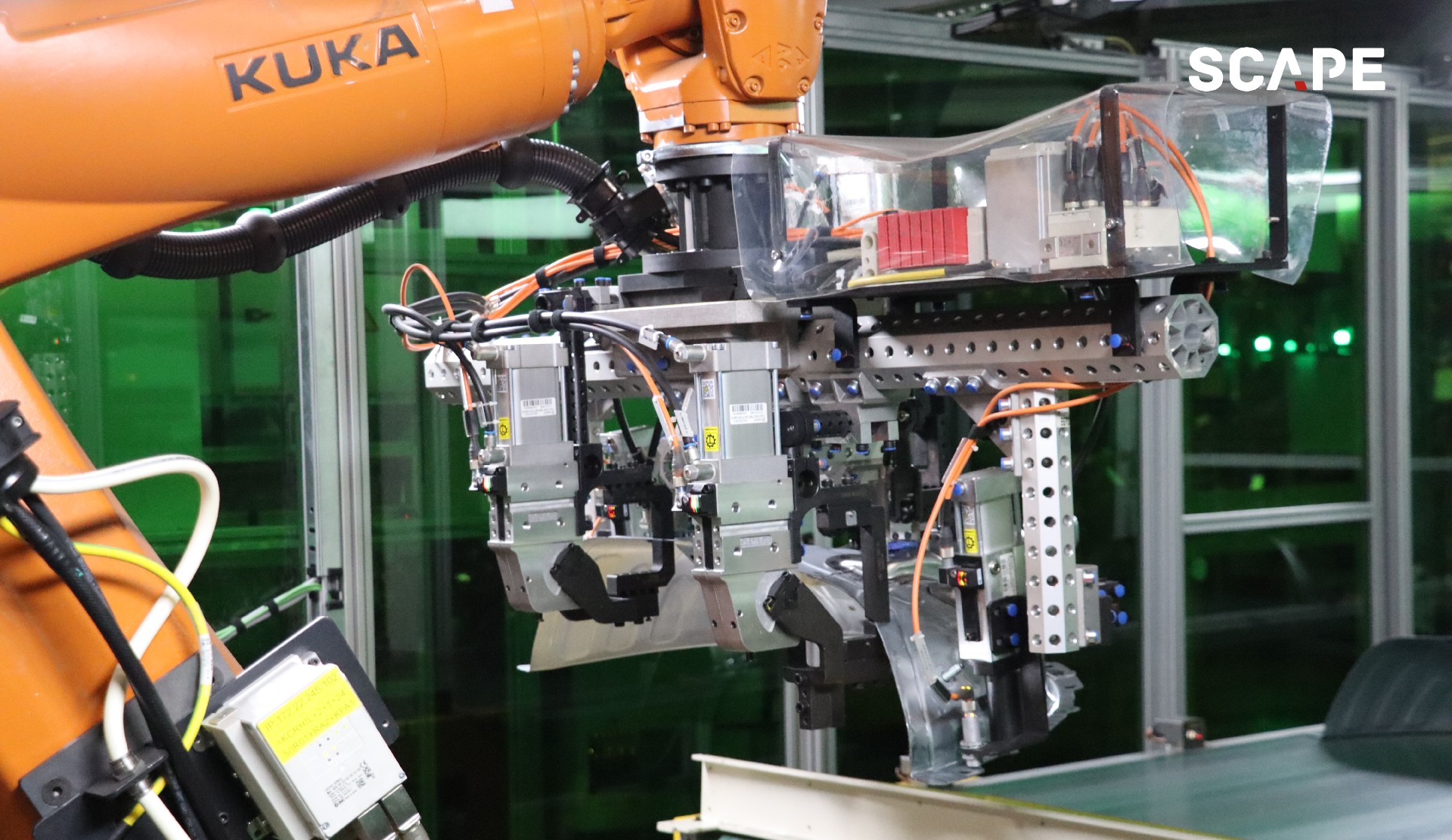
该工位节拍要求异常严格,视科普对整个工业机器人控制这一块做了大量的优化。我们在4个件不做翻面、线路OK的情况下,视科普可以把抓取的时间控制在10-30秒以内全部上完,如果4个零件都需要翻面,也可以控制在40秒以内。
零部件的正反面区别不是很大,要对它区别出来,要不然就是报废品了,同时还要保证功率。针对于正反面的区分,视科普用了现在比较流行的AI技术,然后再加一些其他的专门的设计。