3D视觉引导安装、组装、分拣







安装简单
识别非常光滑的表面
可以多角度扫描
机器人可达范围内可用于多个料框
| 近程 | 远程 | 扩展量程1 | |
|---|---|---|---|
| 预定距目标物的距离 | 460 mm | 600 mm | 7302 mm |
| 预定距离下工作范围 | 400-6302 (mm) | 450-7502 (mm) | 480-8602 (mm) |
| 预定距离下的视场 | 275 *275 mm | 395*395 mm | 434*434 mm |
| 预定距离下横向分辨率(XY-平面) | 1.42 mm | 1.85 mm | 2.25 mm |
| 预定距离下最小扫描面积 | 5.8*5.8 mm | 7.8*7.8 mm | 11.3*11.3 mm |
| 预定距离下深度精度RMS | 0.30 mm | 0.50 mm | 0.80 mm |
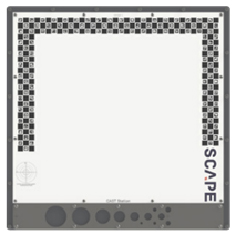
固定安装的优点: 提供了运行全自动自检功能的可能性(检查吸盘和Grid Scanner的校准)
CAST 站用于Grid Scanner的校准、抓手偏移量的测量和吸盘的自检(真空信号、抓手偏移量和吸盘强度)