循环时间:30-40秒
零件重量及尺寸:0.8-1 KG;1100*800毫米(约)
零件送进:高精度送进夹具
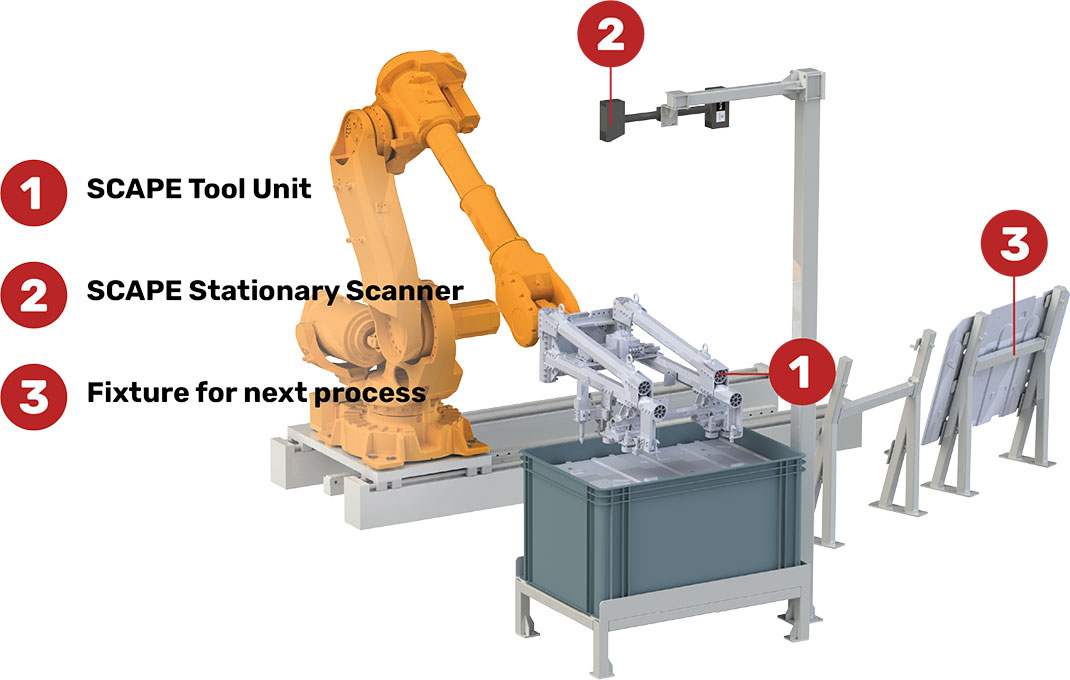
视觉传感器:一台视科普固定式 3D 相机
在该解决方案中,使用了 SCAPE 固定式 3D 传感器。安装在料箱上方的SCAPE 固定式 3D 传感器。
可以处理非常大的零件,主要优点是图像分辨率高、易于安装,并且可以将循环时间降低多达 30%,因为机器人可以在扫描时移动,即机器人不参与图像数据的获取。

系统准备-料箱放至指定工位处-启动固定式3D视觉识别料箱内零件-3D视觉将扫描的数据与视觉系统中的零件信息进行匹对后,判断零件规格-视觉系统识别零件规格后,系统给出抓取点-视觉系统引导机器人吸取零件-零件抓取至下个工位处