周期:Bin-Picking 周期 = 7.5 sec。
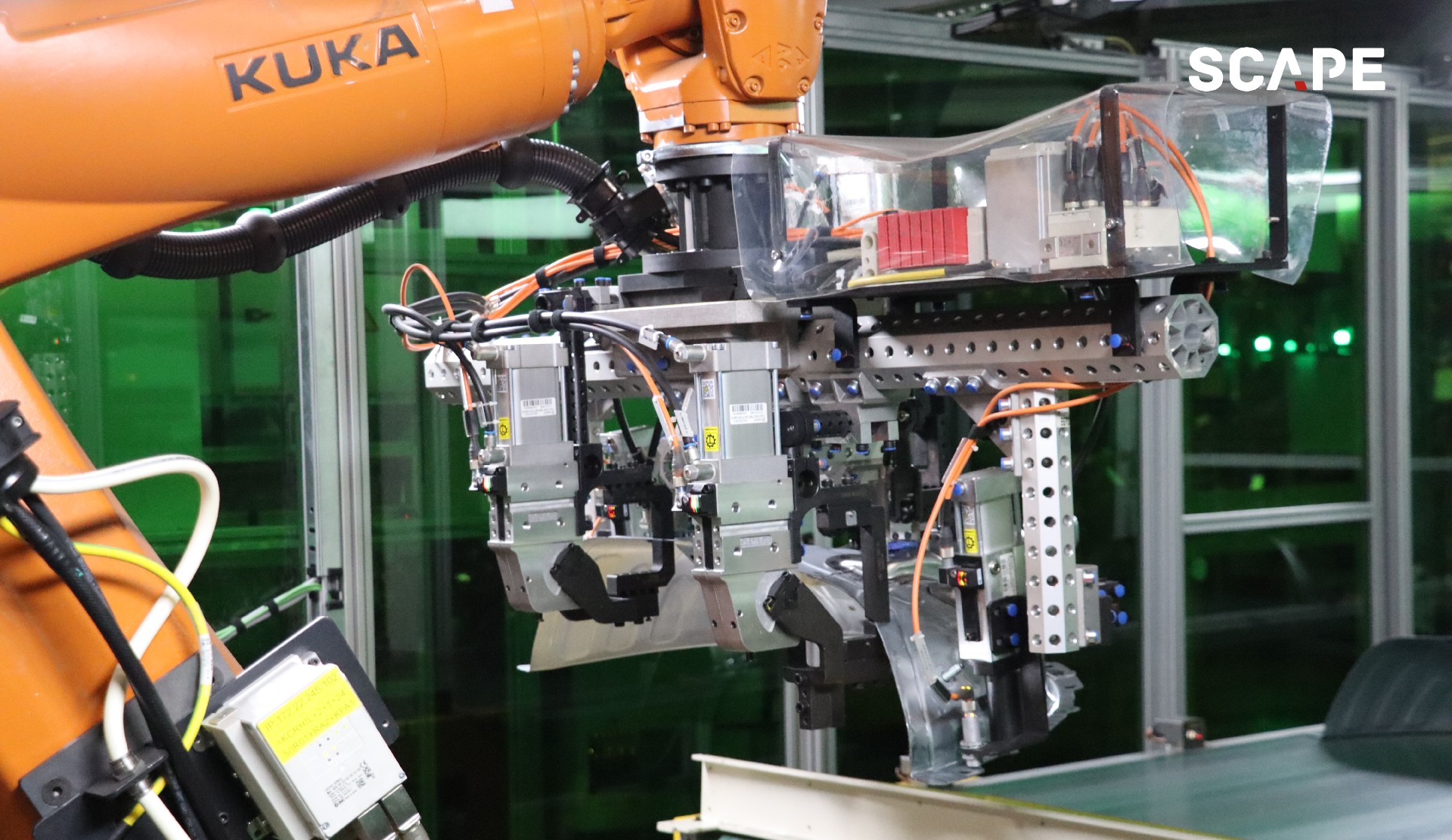
零件:发动机曲轴连杆
零件放置: 传送带上
视觉传感器:SCAPE Sliding scanner
使用磁铁抓手拾取连杆:相较于真空吸盘可以提供更强的吸力(大约两倍于真空吸盘)
采用滑动式相机可以进行快速扫描,能够提高系统整体灵活性并降低近 30%的循环时间,同时还具备较广的工作范围及视场。
该项目可以很快复制到其他场景。
Copyright © 2023 深圳视科普机器人技术有限公司 版权所有
粤ICP备2022095083号
网站建设:卓越迈创