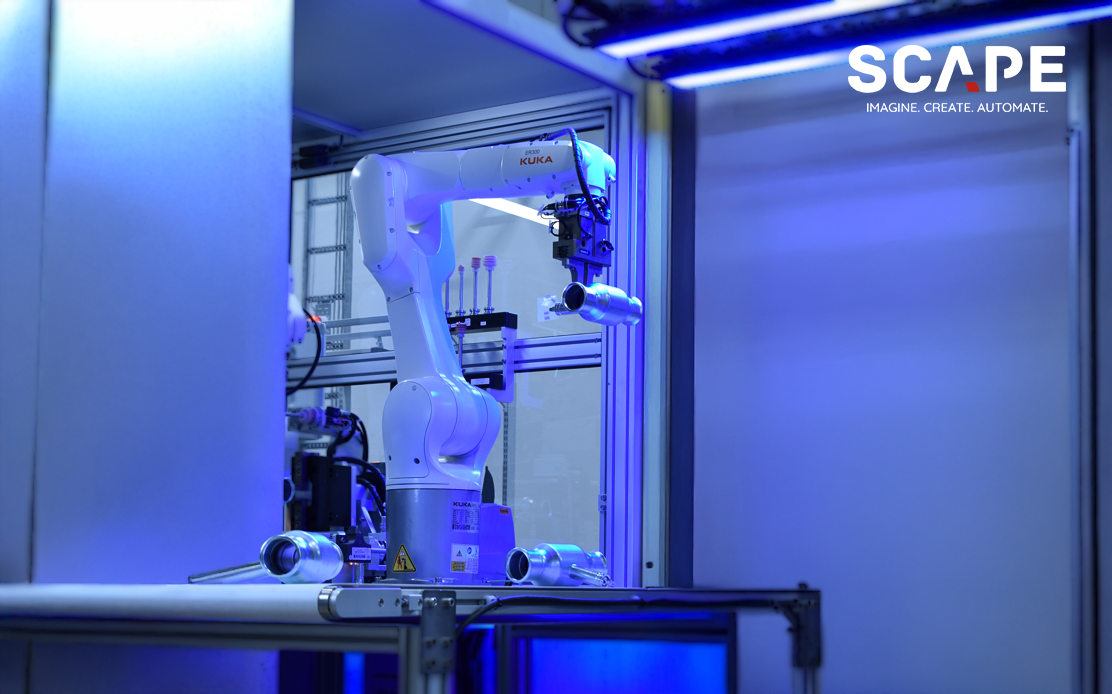
周期:Bin-Picking 周期 = 18 sec
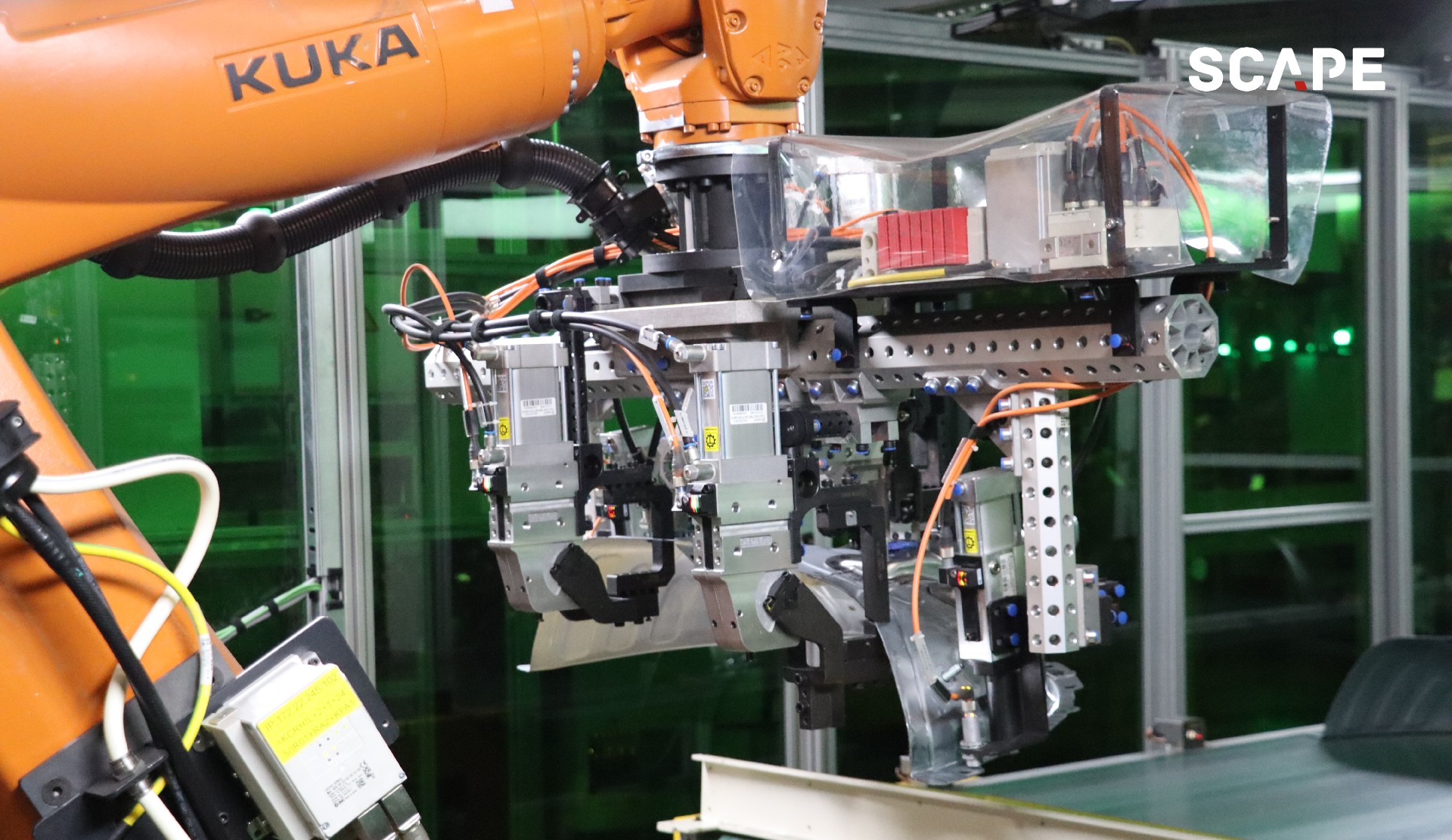
零件:加强梁
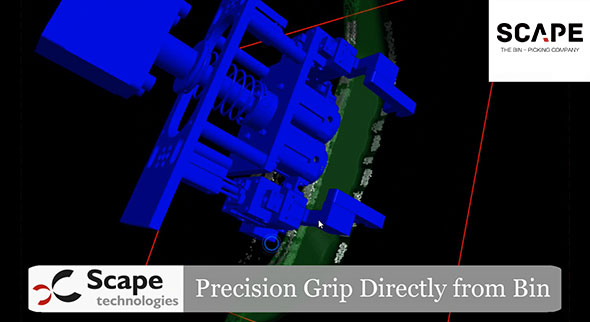
零件放置: 高精度放置于治具中
视觉传感器:SCAPE Grid Scanner
视科普手眼式相机采用基于视图的识别方法,使用来自图像的2D 特征和来自点云图的3D 特征进行分析处理。该相机内置LED 光源,通过自研软件可以识别表面非常光滑的零件,并从一张图像生成3D 点云图。
Scape标准的抓取系统,可实现更高的抓取速度,可根据经验优化自己的拣选逻辑。
Copyright © 2023 深圳视科普机器人技术有限公司 版权所有
粤ICP备2022095083号
网站建设:卓越迈创