汽车漆面自动检测磨抛系统已成果应用于多家汽车制造厂家的不同类型的打磨生产线,其主要涉及车身焊接打磨、发动机变速箱去毛刺抛光、曲轴凸轮轴精细研磨、PUR打磨抛光等环节,其将传统机器人打磨相较于人工打磨的优势发挥到最大化,通过汽车漆面预先自动检测,极大降低了遗漏待修复缺陷的可能,利用HMOS机器人离线编程软件的科学算法和专家工艺库,实现打磨轨迹最优化,极大提高了机器人的打磨效率,且集尘装置可进行全过程密闭除尘,环保效果极佳。

提高机器人缺陷定位准确度、提高磨抛系统的除尘效率、减少人工额外加工时间
创建虚拟打磨工作站→过程规划配置工艺模板→3D视觉拍摄扫描、在线获取车身缺陷特征→规划打磨工作程序→规划安全连接→后台仿真检查与优化→在线启动执行→机器人进行打磨工作、在线监视实时仿真→打磨完成。
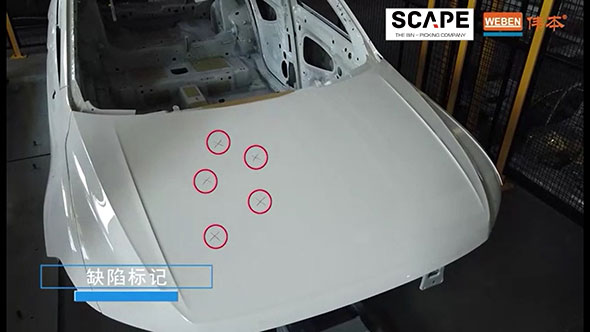
硬件组成:视科普手眼式相机、打磨机器人、汽车承载架、控制系统和集尘装置等,其与传统汽车漆面智能检测磨抛系统的不同之处在于:其在打磨操作前通过手眼相机对待修复的汽车车身进行全面检测,从而避免缺陷遗漏修复,对其缺陷部位进行核算并定位,在所建立的坐标系之下计算出缺陷的大小以及缺陷平面曲线走势,将相关数据传送至控制系统,从而为打磨机器人提供工作数据。
软件组成:SCAPE Communication Server通讯服务器和HMOS机器人离线编程软件,SCAPE Communication Server通讯服务器基于Socket通讯协议,用于SCAPE 软件和机器人程序间的通信服务,所有控制、状态、位置参数均通过该服务器完成,其主要用于汽车漆面缺陷检测数据的处理分析。