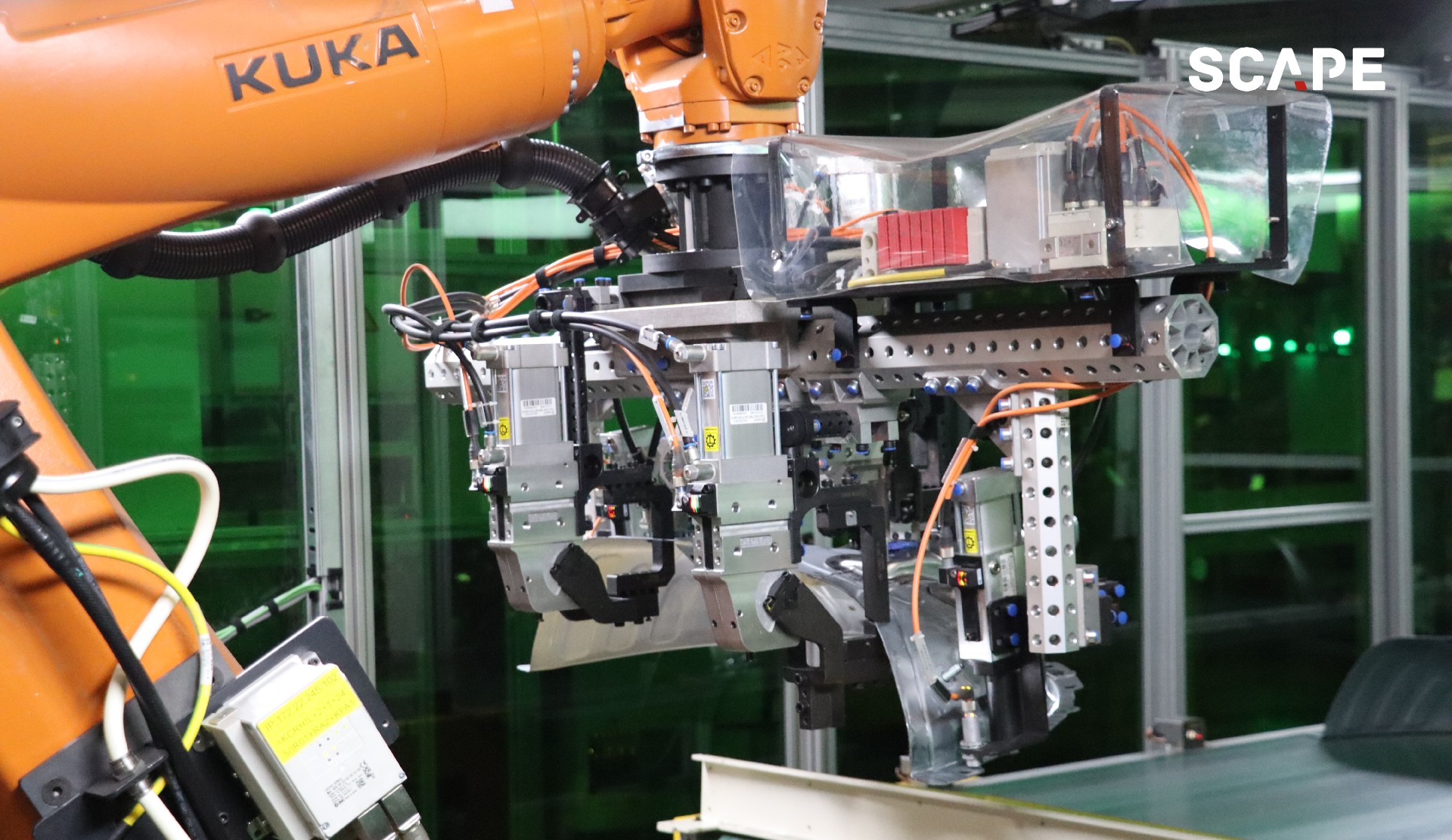
周期:6s一个零件
零件:多种零件组装
零件放置:特定整形台
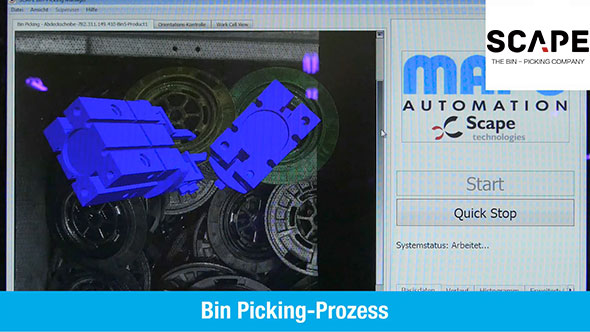
视觉传感器:标准型手眼3D传感器
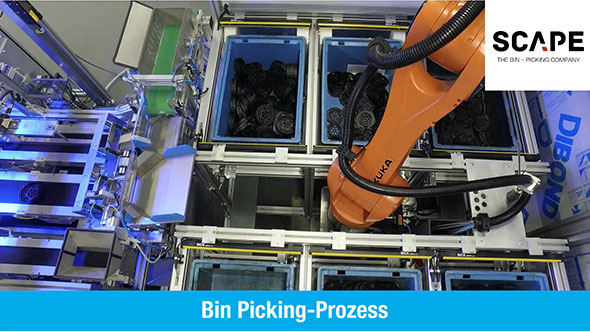
SCAPE Grid Scanner为系统提供了很高的灵活性:在机器人可达范围内,不受箱子数量及位置的限制。
性价比高,需要拍摄一幅图像,即可生成所需的3D点云。其可在不同的量程下工作,即可以按照目标零件的大小选择相应的工作范围。
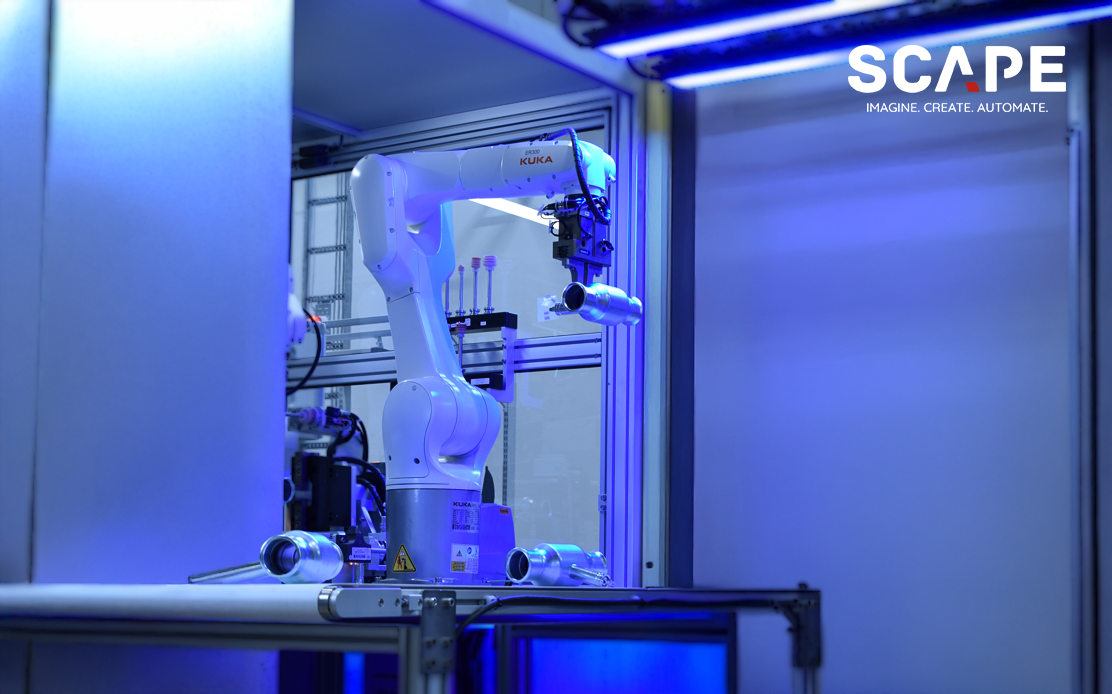
配备SCAPE - CAST站,提供了运行全自动自检功能的可能性(检查吸盘和Grid Scanner的校准) ,保证项目稳定运行。
Copyright © 2023 深圳视科普机器人技术有限公司 版权所有
粤ICP备2022095083号
网站建设:卓越迈创