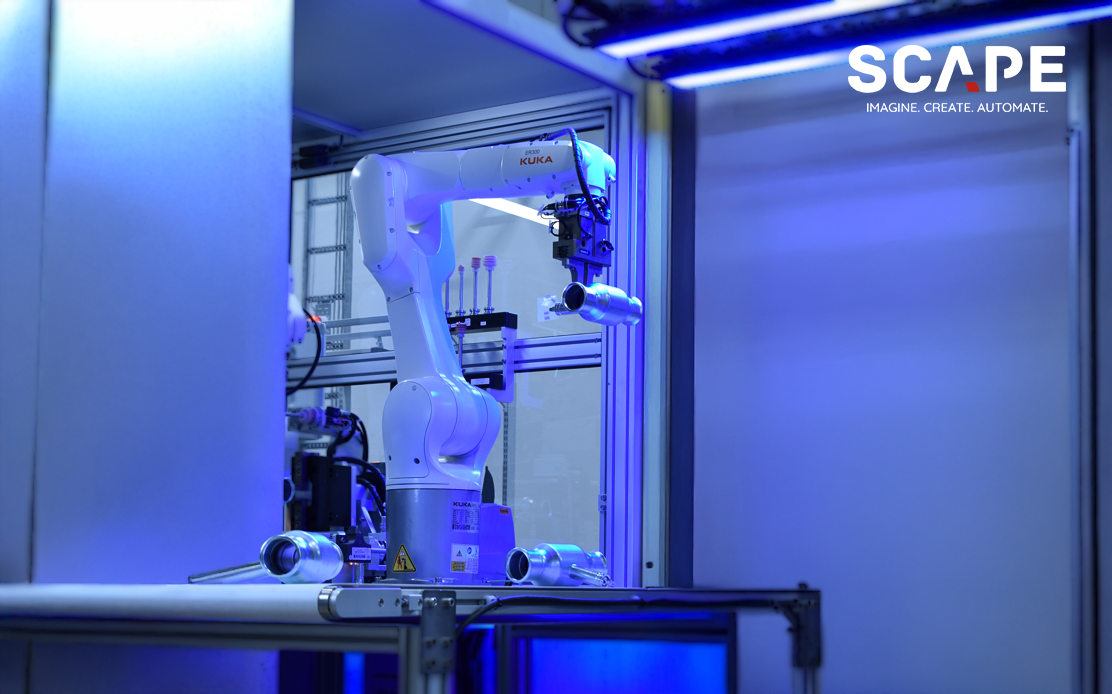
循环时间:15-20秒
部件重量及尺寸: 0.4-0.7 KG;320 x140毫米(约)
零件送进:高精度送进夹具
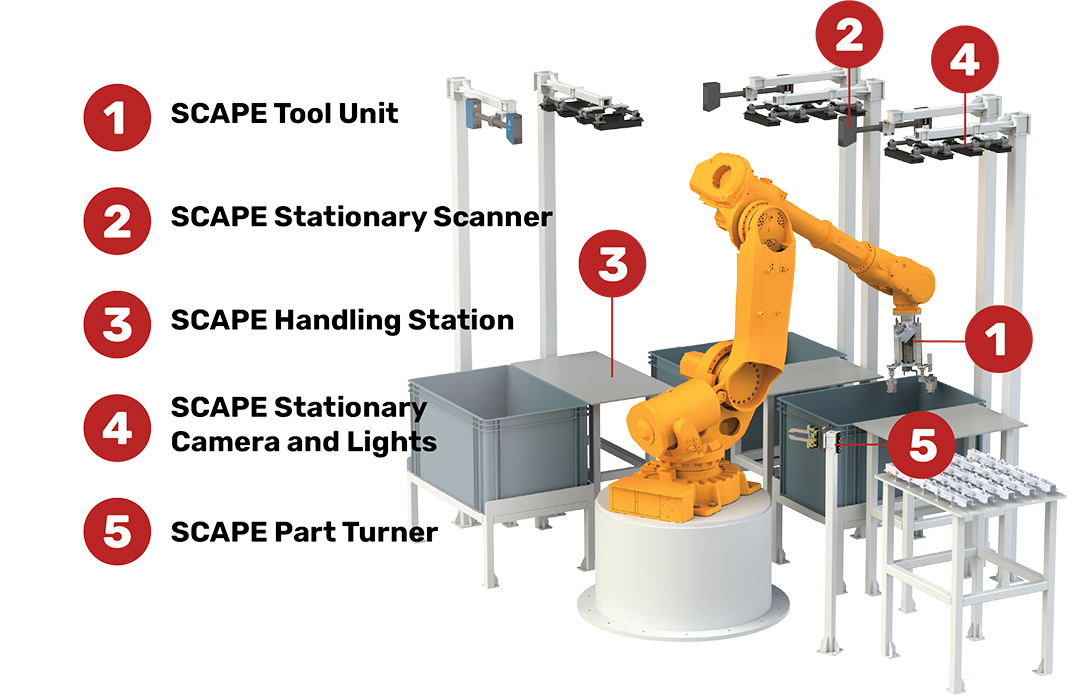
视觉传感器:三个SCAPE 固定扫描仪
视科普Bin-Picking系统结合了机器人运动规划、AI、3D视觉和智能抓手等软硬件核心技术,为工厂自动化提供替代专业技术工人的智能机器人解决方案。
无序来料-料框放在工位处-启动固定式3D视觉,识别料箱零件-3D视觉将扫描的数据与视觉系统中的零件信息进行匹对后,判断零件规格-视觉系统识别零件规格后,系统给出抓取点-视觉系统引导上料 机器人抓零件-物料抓至OC中转台-OC视觉相机拍照,精确识别工件位置及正反面-视觉系统引导上料机器人从OC中转台判断正反面-正面(机器人将物料抓取至下一个工位)-反面(视觉系统引导机器人将物料精准抓取至翻面组件 翻面组件对物料进行180°翻面工作后机器人将零件抓取至下一个工位)