如何使用 SCAPE Bin-Picker 智能搬运解决方案提高料箱清框率?

各行各业和工厂自动化公司都在用料框或周转箱交付产品组件或零部件,并且每天,生产工人花费大量时间在料框或周转箱与机器之间搬运零部件。Scape Technologies 通过可靠、强大的机器人 SCAPE Bin-Picker 智能搬运解决方案解决了人工物料搬运过程,该解决方案提高了生产力并减少了对工人健康有害的人工重复和单调的工作。
当仔细研究自动化物料搬运与机器人Bin-Picking的需求时,它需要软件能够预判到意外情况。Scape Technologies 的解决方案中有多个备份程序,允许系统在发生意外情况时继续抓取零件。即使机器人在料箱中遇到困难,软件也能解决问题,并允许持续稳定地抓取通常以结构化、半结构化或随机方式堆放在料箱中的零件。每种类型的零件形状和定位都有其自身的复杂性和特征,必须根据这些变量进行处理,才能有效地清空料箱。
有些零件几乎没有明显的3D外观特征。3D外观越不明显,当仅使用表面外观进行匹配时,就越难以在3D点云中正确识别它们。

示例图
为了确保使用SCAPE Bin-Picker解决方案进行机器人自动化物料搬运时拥有高清框率,我们接受挑战,在不影响SCAPE Bin-Picker解决方案的可靠性和稳定性的情况下提高对几乎无明显3D外观特征的零件的识别能力。
挑战 在零件几乎没有明显3D外观特征的情况下依然保持高清框率
有些零件几乎没有明显的3D外观特征。3D外观越不明显,当仅使用表面外观进行匹配时,就越难以在3D点云中正确识别它们。
示例图
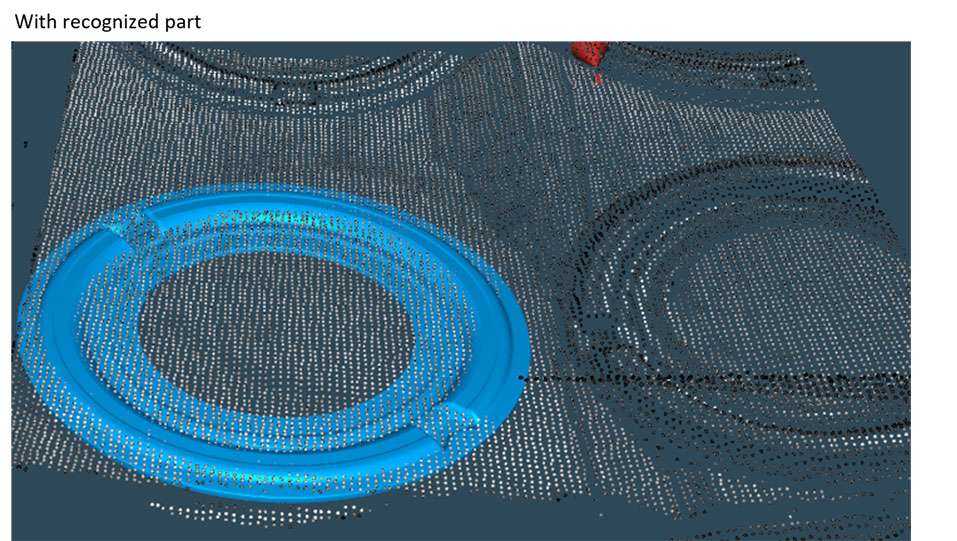
当仅将零件表面与扫描的点云进行匹配时,有时可能会看到类似这样的识别:
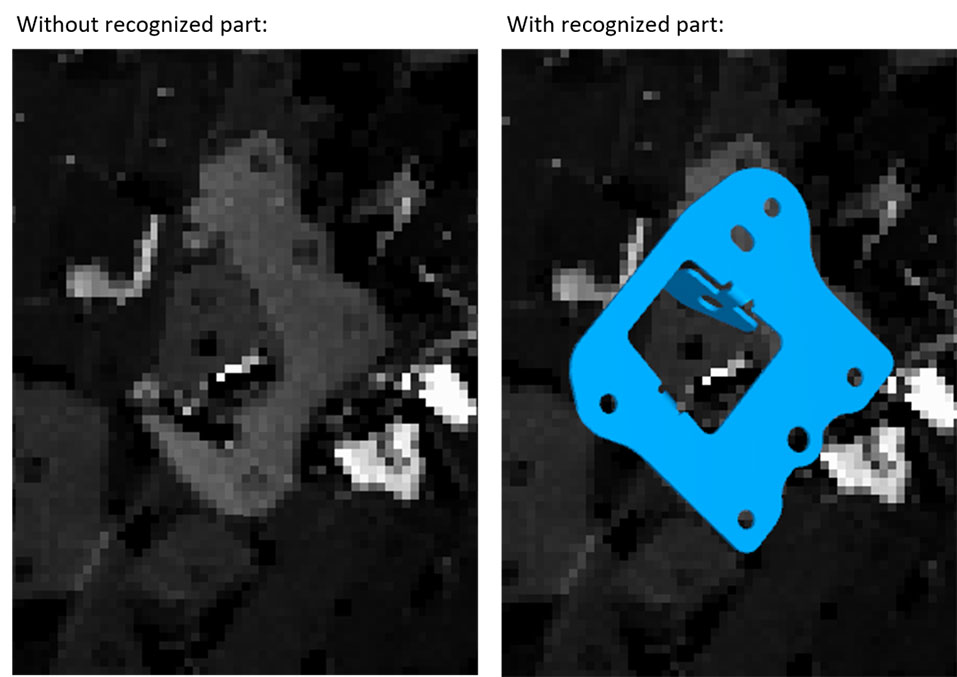
该零件与左侧的其他零件部分重叠,最后,最佳匹配是零件的大部分表面与扫描数据匹配的地方,但该零件的实际姿势并为被识别。
解决方案 使用零件的3D边缘进行识别
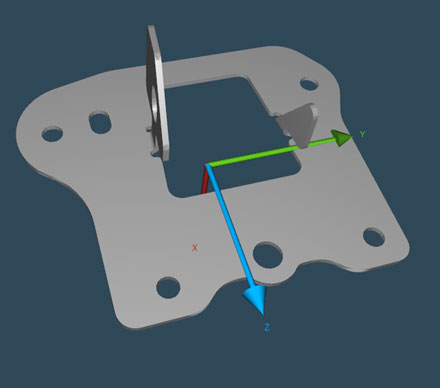
为了改善上述情况,我们现在使用零件的3D边缘进行识别。从CAD模型中提取预期的 3D 边缘:
然后将它们与扫描得到的3D边缘进行比较,作为识别过程的一部分。
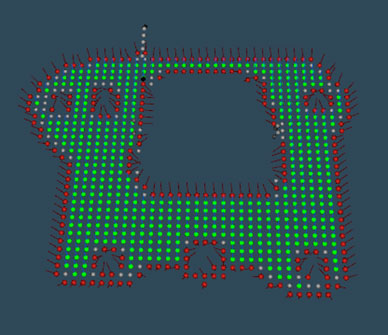
结果 使用零件的3D边缘进行识别
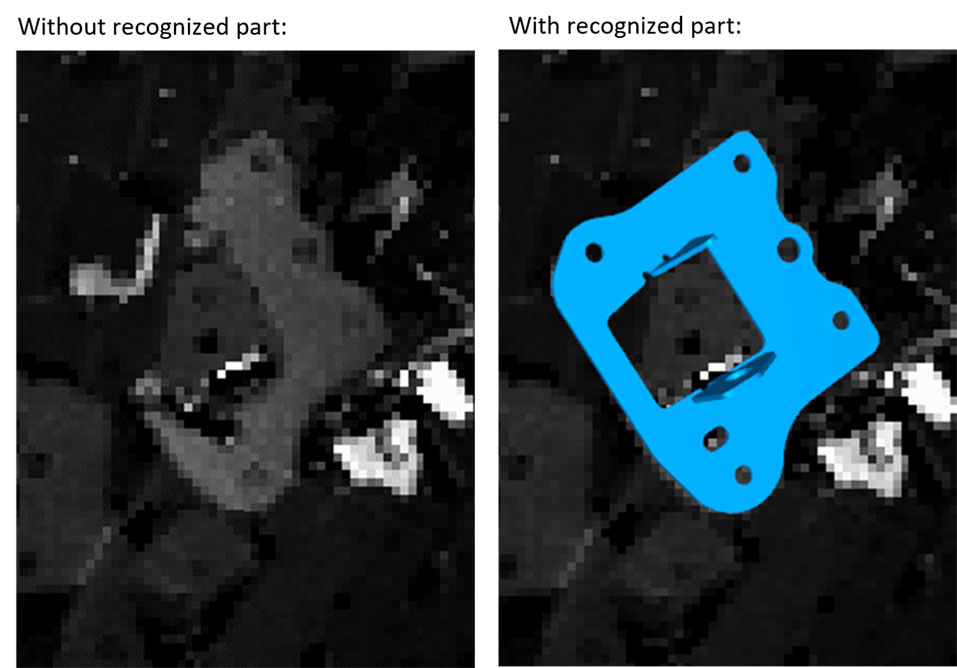
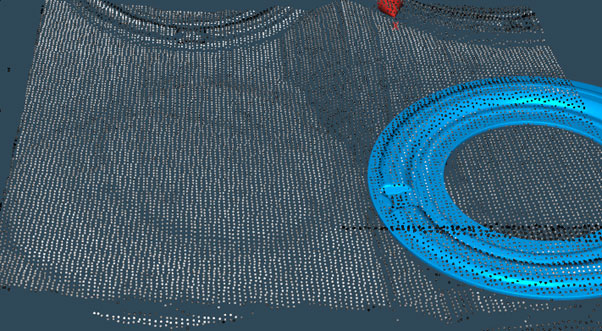
现在上述零件可以被正确识别,因为这是3D边缘与扫描数据的最佳匹配:
额外优势 3D边缘信息还带来了额外的优势
3D边缘信息还带来了额外的优势。它们可以防止在几乎平坦的背景上出现错误的零件识别,例如,一块纸板:如果一个零件之前一直放在纸板上,它的形状可以非常好地匹配零件的形状。

但在引入 3D Edges 后,此类错误识别将不复存在,因为纸板不会生成足够的3D边缘信息,从而将错误识别误认为是正确识别。相反,现在只有右边的零件被识别。
结论 在零件几乎没有明显3D外观特征的情况下依然保持高清框率
通过使用3D边缘信息,SCAPE Bin-Picking 系统的整体性能大大提高,因为现在可以更可靠地识别零件的正确位置和方向。尤其是扁平零件现在可以更准确被抓取,从而减少了料框中失败的抓取次数,并缩短了平均周期时间。此外,新功能可确保较高的清框率,同时不会影响系统的稳定性和安全性,从而缩短转换时间。
SCAPE Part Training Studio 使用步骤
01 第一步
导入工件CAD数据文件
02 第二步
系统生成识别数据库,3D相机对周转箱进行
拍照以获取图像进行识别
03 第三步
为工件设置抓取点,可在需要时自定义或
添加更多的抓取点
04 第四步
进行最终的测试识别、优化设置及抓取训练
测试
专业服务
视科普专业开发与销售工业自动化智能分类方案、轨迹规划计算方案,智能焊接方案,致力于打造工业大国的机器人工匠!
SCAPE BIN-PICKER 新功能现已正式上线,如您想了解使用,请点击“联系我们”即可联系我们的销售或发送邮件至info@scapetech.cn,我们会在第一时间为您提供服务!






